Principe variationnel
Un principe variationnel est un principe physique issu d'un problème exprimé sous une forme variationnelle. Dans de nombreux cas, la résolution des équations de la mécanique peut se ramener à la recherche de géodésiques dans un espace général approprié.

Catégories :
Article à Texifier - Mécanique - Optique - Physique théorique - Physique quantique - Géodésie - Principe physique
Recherche sur Google Images :

Source image : fr.wikipedia.org Cette image est un résultat de recherche de Google Image. Elle est peut-être réduite par rapport à l'originale et/ou protégée par des droits d'auteur. |
Page(s) en rapport avec ce sujet :
- Équations de Lagrange, principes variationnels...... Principe de superposition 2. Systèmes interférentiels à 2 ondes : division du front d'onde, ... (source : cat.inist)
- Les équations de Lagrange à la lumière de la théorie de relativité... 6.1 Système expérimental...... L'amortissement et le principe variationnel.... (source : docinsa.insa-lyon)
- d'énergie, que ce soit sur des dispositifs macroscopiques (équations.... qui illustre la physique des systèmes à porteurs.... Le programme comporte : la relativité, les principes variationnels et la mécanique analytique.... (source : graduateschool.paristech)
Un principe variationnel est un principe physique issu d'un problème exprimé sous une forme variationnelle. Dans de nombreux cas, la résolution des équations de la mécanique peut se ramener à la recherche de géodésiques dans un espace général approprié. D'une part, nous savons que ces géodésiques sont les extrémales d'une certaine intégrale représentant la longueur de l'arc joignant les points fixes dans cet espace. Donc, nous pouvons déjà prévoir qu'au moins occasionnellemen, les problèmes de mécanique pourront s'exprimer comme des problèmes aux variations, c'est à dire, en postulant que la variation première d'une certaine intégrale est nulle. On dira qu'on a diminué les problèmes à leur forme variationnelle. D'autre part, les équations d'Euler établies en mathématiques pour un problème aux variations sont identiques aux équations de Lagrange établies en physique pour résoudre des problèmes de mécanique ; cette similitude suggère bien bien entendu aussi la possibilité de cette réduction à une forme variationnelle.
Principe de Fermat

Quoiqu'on puisse suivre la trace des principes variationnels d'une façon quasi continue de l'Antiquité à nos jours, il faut attendre plus d'un millénaire et demi — de Héron d'Alexandrie (vers la fin du Ier siècle ou le début du IIe siècle) au XVIIe siècle — jusqu'à Pierre de Fermat (1601–1665) pour en retrouver une application pratique. Le principe de Fermat, applicable aux rayons lumineux, peut s'écrire comme suit en tenant compte des améliorations intervenus depuis l'époque de Fermat lui-même :
où P et Q sont deux points fixes, v sert à désigner la vitesse de phase de la lumière et ds est l'élément d'arc du trajet emprunté par le rayon lumineux. La vitesse de phase, c'est à dire la vitesse de propagation, de la lumière peut fluctuer avec le point reconnu, mais non avec la direction du rayon en ce point. [1] Cette équation exprime que la variation (indiquée par la lettre grecque δ) de l'intégrale curviligne  est nulle, c'est-à-dire que la différence entre cette intégrale évaluée le long de la trajectoire réelle et l'intégrale évaluée le long de n'importe quelle trajectoire virtuelle illimitément voisine est un illimitément petit du second ordre. Ceci ne veut pas dire que l'intégrale est minimum, mais uniquement qu'elle est extrémum. En effet, c'est uniquement dans le cas où le trajet PQ est suffisamment petit, de façon à ce que des rayons «voisins» ne puissent recouper le rayon réel, qu'on peut démontrer qu'il s'agit effectivement d'un minimum.
est nulle, c'est-à-dire que la différence entre cette intégrale évaluée le long de la trajectoire réelle et l'intégrale évaluée le long de n'importe quelle trajectoire virtuelle illimitément voisine est un illimitément petit du second ordre. Ceci ne veut pas dire que l'intégrale est minimum, mais uniquement qu'elle est extrémum. En effet, c'est uniquement dans le cas où le trajet PQ est suffisamment petit, de façon à ce que des rayons «voisins» ne puissent recouper le rayon réel, qu'on peut démontrer qu'il s'agit effectivement d'un minimum.
Uniquement la propriété que la première variation est nulle peut être étendue à un trajet PQ arbitraire, d'où le nom moderne de «principe variationnel» plutôt que celui, ancien, de «principe de minimum». Et il faut bien reconnaître que cette modification de terme et d'interprétation fait perdre au principe de Fermat, sinon de son utilité, au moins légèrement de la valeur esthétique et philosophique qui a indéniablement joué un rôle dans son élaboration.

L'étude de certains dispositifs optiques simples permet d'illustrer le problème. En effet, représentons le milieu hétérogène étudié par un de ces dispositifs optiques. Dans cet exemple, l'image du point P, c'est-à-dire le lieu des points de rencontre de l'ensemble des rayons issus de P sous des angles un peu différents, est constituée de deux focales EF et GH dont la distance caractérise l'astigmatisme du dispositif. On peut alors montrer que l'intégrale curviligne est minimale si le second point reconnu, à savoir Q, tombe avant les deux focales, qu'elle est maximale si Q tombe après les deux focales, et qu'elle satisfait à une condition mixte (elle n'est ni un minimum, ni un maximum) si Q tombe entre les deux focales.
Fonction de Hamilton ou Hamiltonien

Le principe de Fermat est un principe variationnel spécifiquement utile à l'optique géométrique. Pour résoudre des problèmes de mécanique, on utilise des principes variationnels faisant intervenir la fonction de Hamilton, qu'on sert à désigner le plus fréquemment sous le terme de «Hamiltonien». Pour arriver à comprendre le sens de cette fonction, considérons un problème à liaisons holonomes mais pouvant dépendre du temps t et qui admet le Lagrangien [2]

et étudions la valeur que prend l'intégrale d'action
au cours de l'évolution du dispositif mécanique reconnu.

Supposons qu'au cours du mouvement naturel du dispositif, le point représentatif dans l'espace de configuration parte d'une position d'origine Q0 à l'instant t0 pour aboutir au point Q1 à l'instant t1. Cette trajectoire naturelle est représentée schématiquement sur la figure ci-contre par la courbe en rouge. Considérons un mouvement arbitraire partant de Po voisin de Qo à l'instant to + δto pour aboutir au point P1 voisin de Q1 à l'instant t1 + δt1.
Nous désirons comparer les valeurs de  pour ces deux mouvements. Pour ce faire, nous calculons la variation de , c'est-à-dire
pour ces deux mouvements. Pour ce faire, nous calculons la variation de , c'est-à-dire

Au point M de coordonnées (q1, q2, ..., qf), atteint sur la trajectoire naturelle à l'instant t, nous associerons sur la trajectoire virtuelle arbitraire le point M'de coordonnées (q1+δ'q1, q2+δ'q2, ..., qf+δ'qf) atteint aussi au même instant t. Soit Q'o le point de la trajectoire variée, c'est–à-dire illimitément voisine de la trajectoire naturelle, atteint à l'instant to, et soit Q'1 celui qui correspond à l'instant t1. Notons les composantes de QoPo, QoQ'o, Q'oPo par δqi, o, δ'qi, o, Δqi, o = (dqi, o/dt) δto, respectivement, et celles de Q1P1, Q1Q'1, Q'1P1 par δqi, 1, δ'qi, 1, Δqi, 1 = q'i, 1 δt1, respectivement.
La vitesse q'i, 1 sur la trajectoire variée ne diffère de celle sur la trajectoire réelle que par une quantité illimitément petite, laquelle ne donnerait dans Δqi, 1 qu'une correction du second ordre. En séparant les intégrations sur les segments terminaux Q'oPo et P1Q'1, nous obtenons :
![\delta \mathcal{S} = [ \mathcal{L}_1 \delta t_1 ]_{Qˆ{'}_1 P_1} - [ \mathcal{L}_0 \delta t_0 ]_{Q_0ˆ{'} P_0} + \int_{ (Q_0ˆ{'}, t_0) \rightarrow ( Q_1ˆ{'}, t_1)} \mathcal{L} dt - \int_{ (Q_0, t_0) \rightarrow ( Q_1, t_1)} \mathcal{L} dt = [\mathcal{L}_1 \delta t_1]_{Qˆ{'}_1 P_1} - [ \mathcal{L}_0 \delta t_0 ]_{Q_0ˆ{'} P_0} + \int_{ t_0 }ˆ{t_1} \deltaˆ{'} \mathcal{L} dt \;\;\;\;\; (1)](illustrations/6f1f2bdc0a127b3da79e00c0d5da98f9.png)
L'intégrand δ'L dans la dernière intégrale est calculé entre des points des deux trajectoires correspondant aux mêmes instants t. On trouve que l'intégrale ∫to→t1 δ'L dt vaut[3]
![\int_{t_0}ˆ{t_1} \deltaˆ{'} \mathcal{L} dt = \sum_k \left[ \dfrac{ \partial \mathcal{L}}{\partial \dot{q}_k} \deltaˆ{'} q_k \right]_1 - \sum_k \left[ \dfrac{ \partial \mathcal{L}}{\partial \dot{q}_k} \deltaˆ{'} q_k \right]_0 + \int_{t_0}ˆ{t_1} \sum_k \left[ \dfrac{ \partial \mathcal{L}}{\partial q_k} - \dfrac{d}{dt} \left( \dfrac{ \partial \mathcal{L}}{\partial \dot{q}_k}\right) \right] \deltaˆ{'} q_k dt \;\;\;\;\; (2)](illustrations/e1f9abb920e37ffb703e838a66c8a7b0.png)
En introduisant les moments conjugués pk aux coordonnées généralisées contravariantes qk, qui représentent les composantes covariantes de la vitesse, et en se souvenant que selon les équations de Lagrange, [4] l'expression figurant entre crochets dans le dernier terme est nulle, on trouve finalement
![\delta \mathcal{S} = [ \mathcal{L}_1 \delta t_1 ]_{Qˆ{'}_1 P_1} - [ \mathcal{L}_0 \delta t_0 ]_{Q_0ˆ{'} P_0} + \int_{ (Q_0ˆ{'}, t_0) \rightarrow ( Q_1ˆ{'}, t_1)} \mathcal{L} dt + \sum_k p_{k,1} \deltaˆ{'} q_{k,1} - \sum_k p_{k,0} \deltaˆ{'} q_{k,0} \;\;\;\;(3)](illustrations/ff0659cfa87c57ba942729e91538948b.png)
Comme δ'q1 = Q1Q'1 = Q1P'1 – Q'1P'1, il vient en termes de composantes : δ'qk1 = δqk1 – Δqk1 = δqk1 – q'k1 δt1 et de même δ'qko = δqko – Δqko = δqko – q'ko δto. Par conséquent, utilisant ces relations, on trouve sous forme condensée[5]
![\delta \mathcal{S} = \left[ \sum_k p_k \delta q_k - \mathcal{H} \delta t \right]_0ˆ1](illustrations/3c6210de6e1fd153596192c103c4cc7a.png)
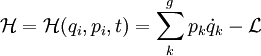
en définissant la fonction de Hamilton (ou le Hamiltonien)

La fonction de Hamilton joue un rôle essentiel dans les principes généraux de la mécanique.
Principe de Hamilton ou principe de moindre action de Lagrange


Si nous admettons que l'ensemble des trajectoires variées passent par les mêmes extrémités Qo, Q1 au même instant to, t1 que la trajectoire réelle, la variation de l'intégrale d'action s'annule :
![\delta \mathcal{S} = \int_{t_0}ˆ{t_1} \mathcal{L} dt = \int_{t_0}ˆ{t_1} \sum_k \left[ \dfrac{ \partial \mathcal{L} }{ \partial q_k} - \dfrac{d}{dt}\left( \dfrac{\partial \mathcal{L}}{\partial \dot{q}_k} \right) \right] \deltaˆ{'} q_k dt = 0](illustrations/4bc4aa4713eafb1885b622ec4cd334f8.png)
d'après les équations de Lagrange. Inversement, si
il faut que les équations de Lagrange soient satisfaites, puisque les δ'qk sont des quantités petites arbitraires. On peut toujours en conclure que les équations d'Euler du problème aux variations sont semblables aux équations de Lagrange. Par conséquent, le principe de Hamilton peut s'énoncer comme suit : Un dispositif se meut d'une configuration à une autre de telle façon que la première variation de l'action

entre la trajectoire naturelle effectivement suivie et toute trajectoire virtuelle illimitément voisine ayant les mêmes extrémités dans l'espace et dans le temps soit nulle.
Ce principe possède une importance énorme qui dépasse l'équivalence formelle entre deux formulations mathématiques équivalentes du même problème. Ceci a d'ailleurs aussi son intérêt : par exemple, cette forme reste bien entendu vraie dans n'importe quel dispositif de coordonnées et , partant, on peut en déduire immédiatement l'invariance des équations de Lagrange pour toute transformation de coordonnées

Mais en particulier, ce principe ouvre la voie à une description de dispositifs non-mécaniques par les méthodes mathématiques de la mécanique classique, comme dans la théorie des champs.
Principe de Maupertuis ou principe de moindre action

Le principe de moindre action de Maupertuis est la forme spécifique que prend le principe de Hamilton pour les dispositifs conservatifs à liaisons holonomes indépendantes du temps. Sous ces conditions, le potentiel s'écrit

et l'énergie cinétique devient

Dans ce cas, l'intégrale d'énergie prend la forme

et on en tire

mais aussi
![\mathcal{H} = \sum_k p_k \dfrac{dq_k}{dt} - \mathcal{L} = \sum_k \left[ \dfrac{ \partial T}{\partial \dot{q}_k} \right] \dfrac{dq_k}{dt} - \mathcal{L} = 2T - \mathcal{L} = T + V = \mathcal{E}](illustrations/6572b64a0a6d2fed5d48191b3b775490.png)
Principe de Gauss ou principe de moindre courbure

Comparaison entre mécanique rationnelle et optique géométrique
On peut consulter à ce sujet l'ressemblance entre l'optique et la mécanique.
Équations d'Hamilton
Soit  la fonction de Hamilton du dispositif, les équations canoniques de Hamilton s'écrivent alors :
la fonction de Hamilton du dispositif, les équations canoniques de Hamilton s'écrivent alors :

Pour un dispositif à g degrés de liberté, la fonction de Hamilton est une fonction des coordonnées généralisées qi du dispositif, de ses moments généralisés pi tel que  et du temps t :
et du temps t :
est la transformée de Legendre du lagrangien. Sa différentielle s'écrit :
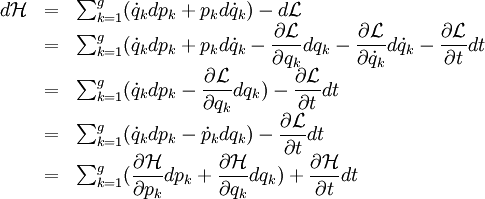
La dernière identiqueité sert à déduire les équations canoniques de Hamilton.
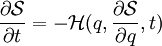
Équation d'Hamilton-Jacobi
L'équation d'Hamilton-Jacobi s'écrit :

- ↑ Ceci est une restriction importante : on peut supposer que le milieu traversé par la lumière est hétérogène, mais il doit être optiquement isotrope. Le cas d'un milieu optiquement anisotrope, par exemple un cristal dont la symétrie n'est pas celle du dispositif cubique, introduit une complication car il faut alors considérer un «rayon ordinaire» et un «rayon extraordinaire».
- ↑ avec qi les coordonnées généralisées du dispositif (i = 1, ..., g), g étant le nombre de degrés de liberté du dispositif. On notera la dérivée comparé au temps de la coordonnée généralisée qi :

- ↑ Puisque M et M'sont des positions simultanées (correspondant à δ't = 0), la variation δ'L de la fonction de Lagrange L est δ'L = L (M') – L (M) = ∑k [ (∂L/∂qk) δ'qk + (∂L/∂q'k) δ'q'k) ].
D'autre part, comme δ'et d/dt sont deux opérateurs qui peuvent commuter, on a aussi δ'q'k = δ' (dqk/dt) = d (δ'qk) /dt, si quoique le dernier terme dans δ'L peut toujours s'écrire (∂L/∂q'k) δ'qk = (∂L/∂q'k) d (δ'qk) /dt = d[ (∂L/∂q'k) δ'qk]/dt – δ'qk d (∂L/∂q'k) /dt.
En introduisant cette expression dans le dernier terme de (1), on trouve (2). - ↑ L'expression générale des équations de Lagrange en présence d'un Lagrangien L = L (qk, q'k, t) est d (∂L/∂q'k) /dt – ∂L/∂qk = 0.
- ↑ Avec ces relations, (3) devient δS = L1 δt1 + Σk pk, 1 (δqk, 1 – q'k, 1 δt1) – [Loδto + Σk pk, o (δqk, o– q'k, o δto) ] = (L1 – Σk pk, 1 q'k, 1) δt1 + Σk pk, 1 δqk, 1 – (Lo – Σk pk, o q'k, o) δto – Σk pk, o δqk, o ou δS = – H1 δt1 + Σk pk, 1 δqk, 1 + Ho δto – Σk pk, o δqk, o.
- H. Goldstein (1980). Classical Mechanics (Second Edition), Addison-Wesley Publishing Company, Reading, Massachusetts. ISBN 0-201--02969-3.
Liens externes
Recherche sur Amazone (livres) : |
Voir la liste des contributeurs.
La version présentée ici à été extraite depuis cette source le 13/04/2009.
Ce texte est disponible sous les termes de la licence de documentation libre GNU (GFDL).
La liste des définitions proposées en tête de page est une sélection parmi les résultats obtenus à l'aide de la commande "define:" de Google.
Cette page fait partie du projet Wikibis.
 Accueil
Accueil Recherche
Recherche Début page
Début page Contact
Contact Imprimer
Imprimer Accessibilité
Accessibilité